教員の紹介

研究者情報
-
学位
博士(工学)
-
担当授業科目
ロボット工学,システム制御,情報デザイン・コミュニケーション総合工学I,情報デザイン・コミュニケーション総合工学II,情報デザイン・コミュニケーション工学概論,情報通信数学,地域未来デザイン工学入門
-
専門分野
制御工学
-
研究テーマ
制御系のロバスト安定性解析,非線形制御,ロボット工学,高度道路交通システム(ITS)
-
研究内容キーワード
ロバスト安定,区間パラメータ,単調性,RF-ID システム
-
所属学会
電気学会,計測自動制御学会,システム制御情報学会,ロボット学会,ITS Japan,米国電気電子学会(IEEE)
研究室の概要
この研究室では、ロボット・制御、ITS(Intelligent Transport System: 高度道路交通システム)に関する研究をしています。
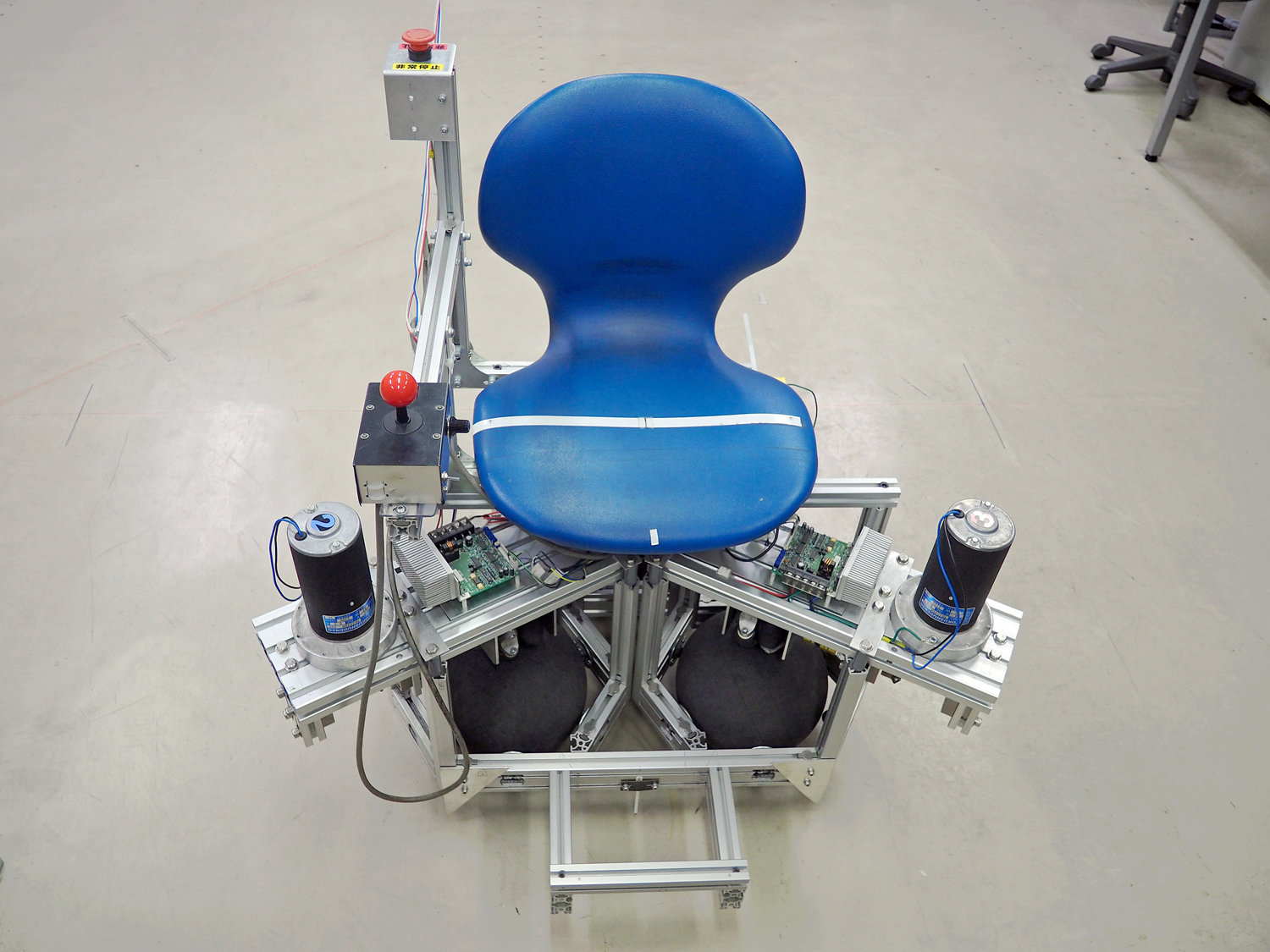
ロボット・制御分野では、普通の車輪の代わりにゴム球を駆動輪にしている独自の球輪装備車両を考え、人が乗車可能な車両で実験研究をしています。ほかに森林工学で小型下刈機の作業効率向上を目指した研究や小型の点対称型の4脚歩行ロボットの歩行動作などの研究をしています。
ITS分野では、GPSや白線認識技術の弱点を補うために猛吹雪の雪道を運転できる技術を考えて、RFIDを用いた車両誘導の研究をしています。これは大学構内の実験線で自動車を用いて走行実験を行っています。この研究の応用として、天井にRFIDタグを取り付けて、電波環境の悪い屋内でも歩行者の位置を推定して誘導する研究をしています。実験用機械・器具の設計制作だけではなく、動かすためのプログラムも研究しています。
研究室の研究テーマ
-
ロボット・制御に関する研究
このテーマの研究対象は球輪車両、下刈機と4脚歩行ロボットがあります。球輪車両は搭乗可能で駆動輪(直径24cm)3つによる駆動ベクトルを合成して理論上は全方位に移動できます。現在は上下左右斜め4方向の合計8方向とその場で左右への旋回ができます。森林工学では小型軽量な下刈機の作業効率向上を目指して、機構の改良などをしています。小型4脚歩行ロボットは全方位移動を縦横、斜め方向の歩行ができます。
-

RFIDのITS(高度道路交通システム)応用等
RFIDはRadio Frequency Identifierの略で比較的近い距離でデータの送受信をします。ITS(高度道路交通システム)への応用は、道路に位置情報などを書き込んだRFIDタグを埋めて、これを車載のアンテナで読み取ります。これと方位情報などで車両の誘導を行います。人為的な悪視界条件下で自動車を大学構内で走らせています。同様にRFIDタグに位置情報などを書き込み、これを実験室や廊下の天井に取り付け、携帯型の送受信機で読み取り、歩行者の位置推定、誘導を実験しています。