教員の紹介

研究者情報
-
学位
博士(工学)北海道大学
-
担当授業科目
機械知能・生体総合工学I ,機械知能・生体工学概論,機械知能・生体工学実験I ,ロボティクス,ラボラトリーセミナー
-
専門分野
ロボット工学、A.I.、コンピュータビジョン
-
研究内容キーワード
ロボット工学,A.I.,コンピュータビジョン
-
所属学会
IEEE, JSME
研究室の概要
本研究室では、ロボティクスとAI(人工知能, Artificial Intelligence)を中心に研究をします。例えば、自律移動ロボットにおける環境地図作成、自己位置推定や経路計画のアルゴリズム・システムを開発します。また、AIやコンピュータビジョンを使用して雪環境における自動運転車のシステムを開発しています。更に、スマートヘルスケアシステムをはじめ、日本の農業人口の減少と高齢化に対して、機械工学や人工知能、ロボット技術で農業を支える研究も行っています。
研究室の学生が、全くゼロからプログラミングや技術を学び、国際学会や国内学会で研究成果を発表して成長し、将来の技術者として活躍するための教育にも力を入れています。
研究室の研究テーマ
-
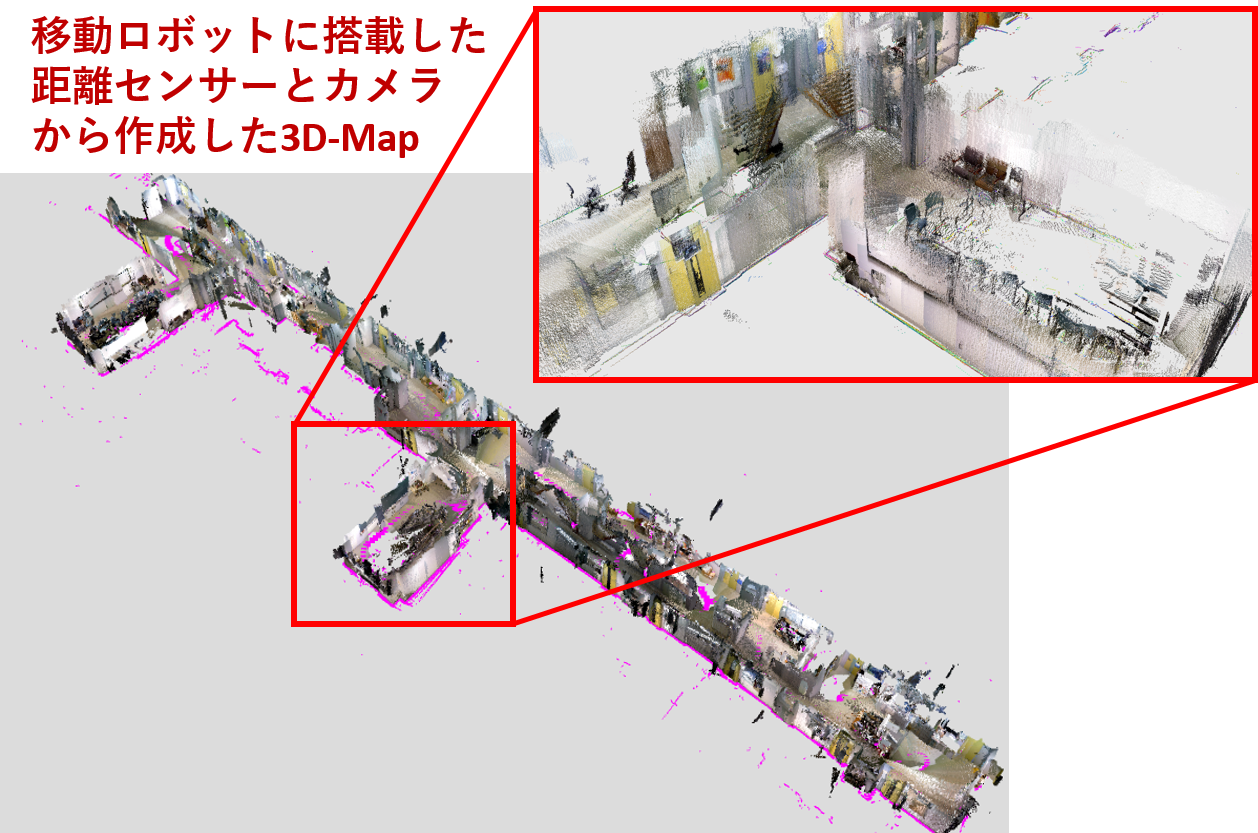
自律移動ロボットにおける経路計画、タスク協調、環境地図構築及び自己位置のアルゴリズム開発
自律移動ロボットにおいては、環境のマップ構築、自己位置推定、ナビゲーションは不可欠です。これらは、自動運転車や農業ロボットにも必要です。自律ロボットに必要なアルゴリズムを開発し、人々を日常生活でサポートするロボット、人と一緒に存在するロボットを開発します。
-
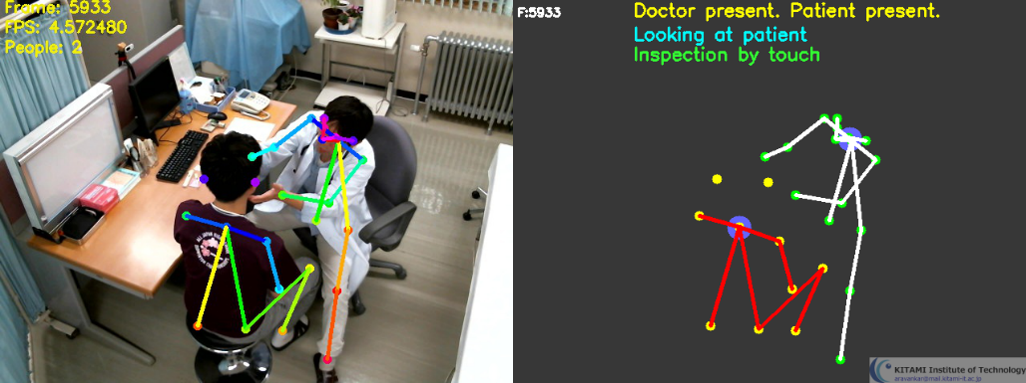
ロボティクスとAIによるスマートヘルスケアシステムの開発
コンピュータビジョン・ディープラーニング・機械学習を使用して様々なスマートヘルスケア向けシステムを開発しています。例として、医療従事者の負担軽減を行うために、画像処理技術を用いて医療現場における医療従事者の自動的に行動を分析し、客観的に評価するシステムを開発しています。また、医療向けロボットシステムを開発しています。
-
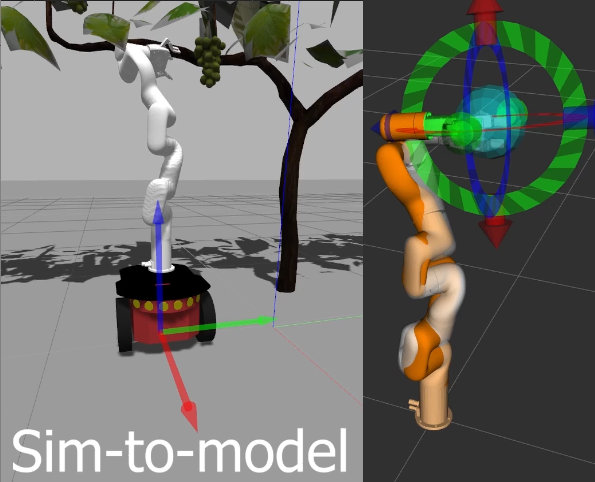
ブドウ園向け小型自律移動ロボットによる収穫および除草システムの実装
北海道では、第一次産業である大規模農業においてブドウ園は重労働作業が多いことが特徴であり、農業従事者の作業軽減のためにロボットやAI技術を活用したスマート農業のニーズが非常に大くなっています。そこで、本研究では、ブドウ園における作業負担を減少するために自律移動ロボットによる収穫・除草・モニタリングシステムの開発を進めています。
本研究で開発するアルゴリズムとシステムは、北海道の北見市近郊のブドウ園で実証実験を行っています。なお、本システムは、ブドウ園だけでなく、北海道の山間地にあるGPS(Global Positioning System) 信号の状況が悪いサクランボ農園やリンゴ農園でも使用ができ、これらの農家の作業負担の減少に大きく貢献すると思われます。